
DSM Online Support
Support Master
Welcome to DSM Online
How can I help you today
How can we assist you? please let us know the support you need from DSM Online
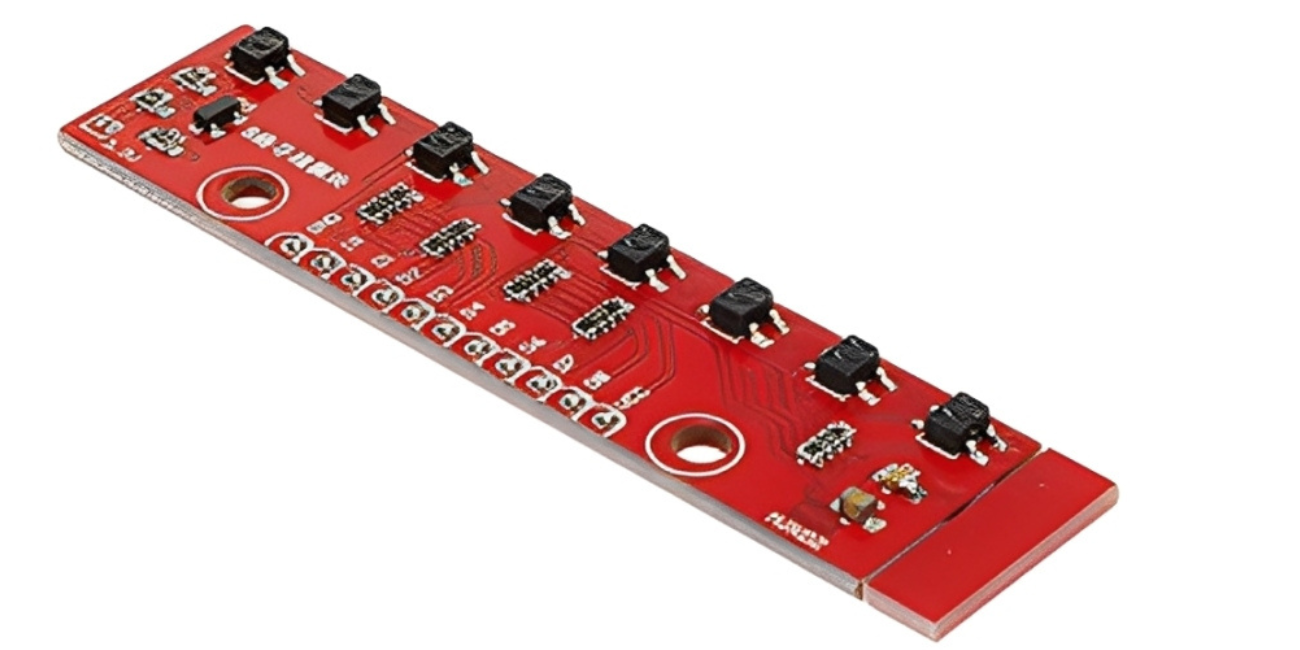
In the exhilarating world of mobile robotics, few tasks are as fundamental—or as challenging—as line following. A successful line-following robot isn't just about raw motor speed; it's about the precision of its "eyes." For years, the QTR-8RC Line Following Reflectance IR Sensor Array has been the industry standard, providing the accuracy and reliability needed for competitive speed and flawless tracking.
This powerful sensor array is a cornerstone of modern mobile robotics, turning the simple task of tracking a line into a highly refined art. If you are a student, hobbyist, or engineer building a line follower robot sensor for speed competitions or sophisticated automation, understanding the QTR-8RC is your first step toward true mastery.
The QTR-8RC is an array of eight infrared (IR) sensor pairs, where each pair consists of an IR LED (emitter) and a phototransistor (detector). The detector measures the amount of IR light reflected back from the surface directly below it.
Reflectance Principle: Dark surfaces (like a black line) absorb IR light, resulting in a low reading. Light surfaces (like a white track) reflect IR light, resulting in a high reading. The IR reflectance sensor array measures this contrast.
The Power of Eight: Why eight sensors? A wider 8-sensor array gives the robot a much broader field of vision. Instead of relying on just two or three sensors for basic digital decisions (turn left or turn right), eight sensors provide a continuous data stream that allows the robot to determine the precise position of the line beneath it. This information is crucial for implementing proportional control, enabling smooth, fast corrections rather than jerky, overshooting movements.
The "RC" in the QTR-8RC name refers to a clever Resistive-Capacitive timing measurement technique that simplifies the interface dramatically. It's a key feature that makes this sensor easy to integrate, especially with microcontrollers that have limited Analog-to-Digital Converter (ADC) pins.
Here is how the ingenious RC time constant measurement works:
Charging: The microcontroller sets an output pin high, momentarily charging a small capacitor connected to the sensor's phototransistor.
Discharge Timing: The pin is immediately switched to an input. The phototransistor acts as a variable resistor whose resistance is determined by the light it sees.
White Surface (High Reflection): High reflection means low resistance, and the capacitor discharges quickly.
Black Line (Low Reflection): Low reflection means high resistance, and the capacitor discharges slowly.
Reading: The microcontroller measures the time it takes for the capacitor to fully discharge. This time measurement is your output value.
This method means that a single digital I/O pin can be used to read the proportional reflectance value for each of the eight sensors. This frees up precious ADC pins for other crucial sensors, such as distance measurement or battery monitoring, making the QTR-8RC for Arduino an incredibly efficient choice.
Raw sensor data is rarely useful in a dynamic environment. The key to mastering the QTR-8RC line following sensor lies in software processing and calibration.
Self-Calibration: The first step for any serious robot is calibration. The robot must briefly scan the environment (the black line and the white surface) to determine the minimum ("pure black") and maximum ("pure white") values in the current lighting conditions. This step makes the robot immune to changes in ambient light.
Weighted Averaging: The controller then takes the eight calibrated sensor values, weighs them based on their position, and generates a single, normalized value that represents the exact center of the line. For example, a value of 0 might mean the line is far left, a value of 7000 might mean it's far right, and 3500 means the robot is perfectly centered.
This single, centralized number is the foundation for implementing advanced control algorithms, such as PID (Proportional-Integral-Derivative) control, which is the secret sauce for achieving championship-level speed and smoothness in any line follower robot sensor application.
The QTR-8RC Line Following Reflectance IR Sensor Array is a powerful piece of engineering that turns light reflection into precise, actionable data. Its unique RC measurement technique, combined with the wide field of view provided by the 8-sensor array, makes it the superior choice for any mobile robot project. If you want your creation to track a line with intelligence, speed, and unwavering stability, the QTR-8RC is the essential component you need.

